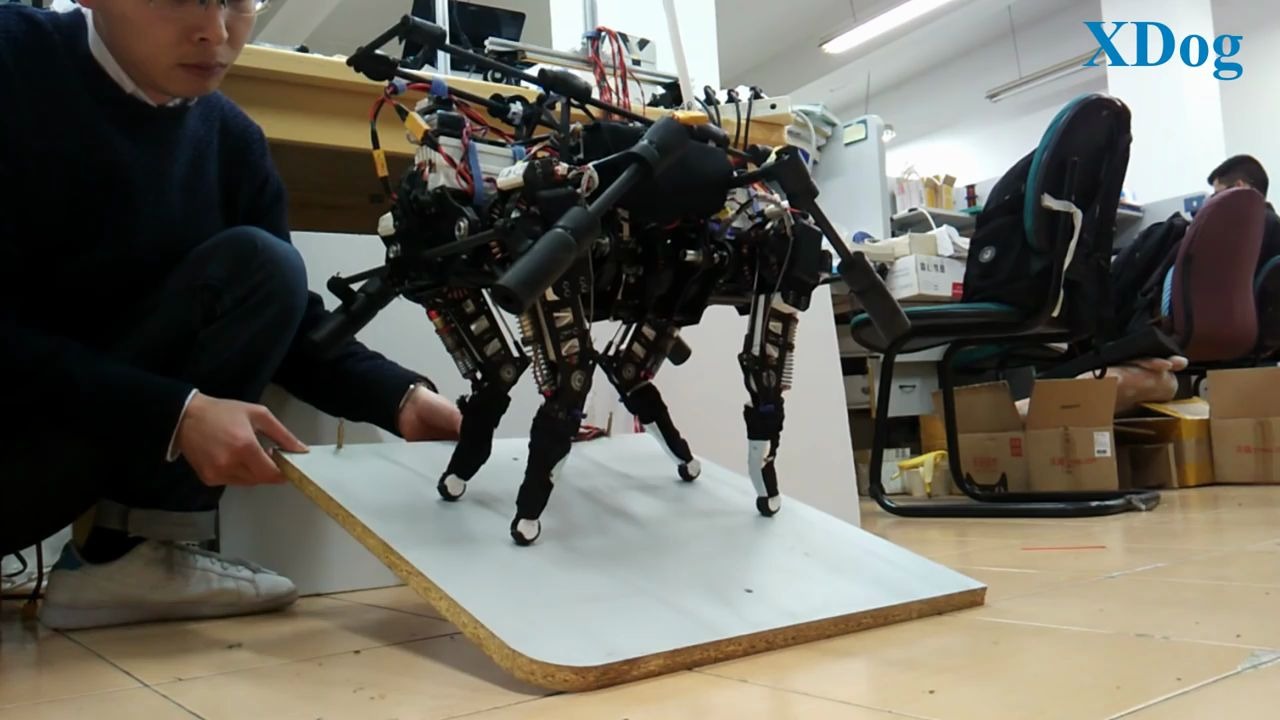
【毕设】XDog 从电路板、整机机械结构到运动控制
我一个人完成的毕设。
2013~2016年完成,13年下半年完成了机器人的基本控制仿真,14年上半年自研了无刷电机的PCB驱动板和FOC控制程序,14年下半年主要在折腾整机的高速实时通讯。 当然在13年到15年期间,陆续设计了整机的机械结构、力传感器和运动控制程序等。
15年,为了完成这台机器人,主动申请延毕了半年。15年下半年也是通过这台机器人很迅速的拿到了DJI的offer。
也是在15年,用这台机器人,一个人报名参加了上海的一个科创比赛,拿了二等奖(一等奖是上海交大的一个团队),获得了8万元奖金。
这台机器人,研发成本,其实只有1~2万元人民币(前期,我自己垫了小几千本科时候攒的钱,后期导师赞助的经费)。 所以这台机器人帮我硕士期间,赚了好几万元人民币(从这后就没找家里要过一分生活费了,当时对我来说的巨款,后来16年创业初期,马上花光了。。。)