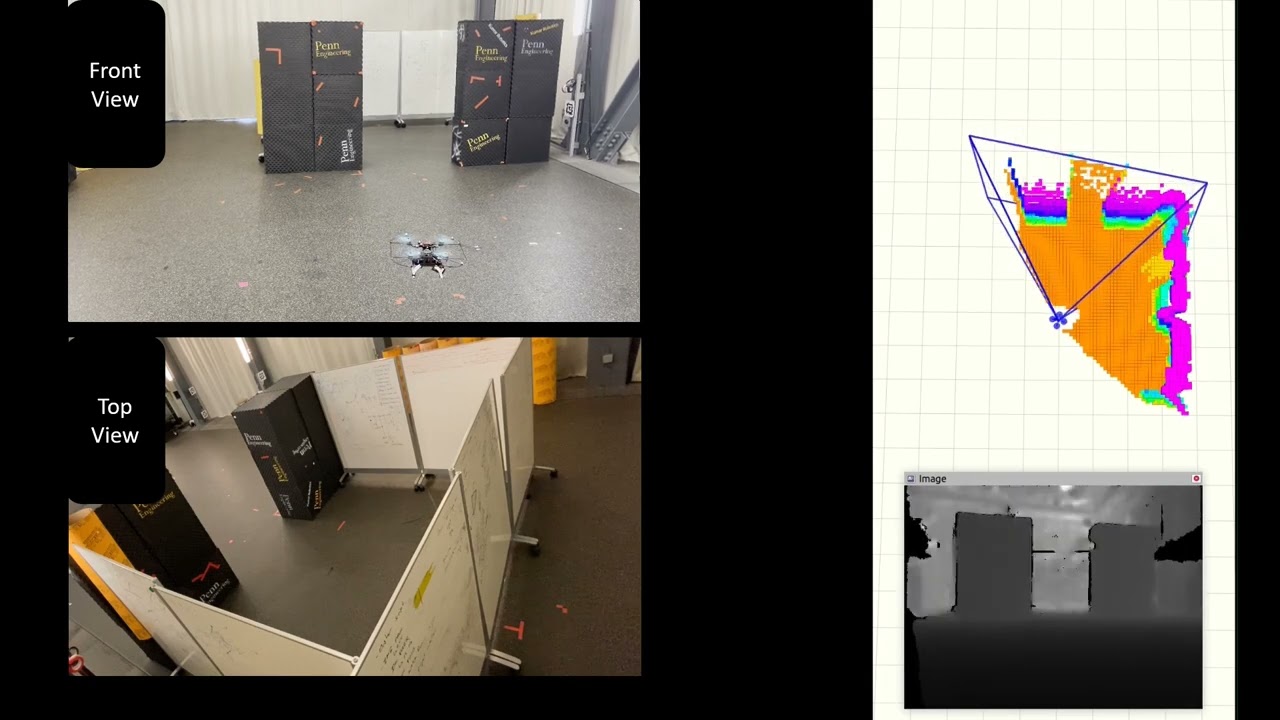
We address the problem of efficient 3-D exploration in indoor environments for micro aerial vehicles with limited sensing capabilities and payload/power constraints. We develop an indoor exploration framework that uses learning to predict the occupancy of unseen areas, extracts semantic features, samples viewpoints to predict information gains for different exploration goals, and plans informative trajectories to enable safe and smart exploration. Extensive experimentation in simulated and real-world environments shows the proposed approach outperforms the state-of-the-art exploration framework by 24% in terms of the total path length in a structured indoor environment and with a higher success rate during exploration.
arxiv: https://arxiv.org/abs/2209.11034